�gӭ���R~�Ϻ�������ӿƼ�����˾
 ȫ�����՟ᾀ��
ȫ�����՟ᾀ��
13371980026
ȫ�����՟ᾀ��
13371980026




FANUC�C���� R-30iB Compact Plus����ݔ��/ݔ����̖Ҏ��Ԕ�����£�
����O��ӿ�
��1�� ����O��ӿڵ�ݔ����̖Ҏ��Դ�c����̖ݔ����
��a�� �B����
��b�� 늚�Ҏ��
����ON�r���ؓ�d����� 200mA������˲�r��
����ON�r�늉��� 1.0Vmax
�͉��� 24V��20%������˲�r��
����OFF�r����©����� 100��A
��c������ݔ����̖���ⲿ�Դ�����ṩ������ʾ���Դ��
�Դ늉��� +24V��10%
�Դ����� ÿһ�K��ӡˢ�·��ģ�����˲�r�����ؓ�d����Ŀ�����+100mA���ϣ�
ͨ늕r�C�� �c�����b��ͬ�r��������֮ǰ
�Դ���_�r�C�� �c�����b��ͬ�r��������֮��
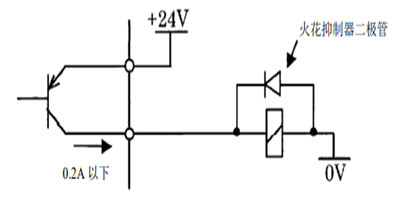
��d�������������O��
�~������ֵ����늉��� 100V����
�~������������� 1A����
��e�����Pݔ����̖�õ�����
������Ԫ���Ȍ�ÿ1��ݔ����̖�Oҕ��������z�y���^����r����ԓݔ������OFF���^����������ݔ��OFF���������ѽ�OFF�����ٞ��^�����B���֏͞�ON��B����ˣ��ڽӵع��ϻ��^ؓ�d��B�£�ԓݔ��������ON/OFF�������@�ӵĠ�B���B�ӛ_��������ؓ�d�rҲ���l����
���⣬����Ԫ����߀�����^��z�y�·����ݔ���Ľӵع��ϵȶ��^�����B���m��Ԫ���Ȳ��ض���������r�£���Ԫ��������ݔ��������OFF��Ȼ��OFF��B����������������Ԫ���Ȳ��ض��½���ͨ�^�M�п����b���Դ��ON/OFF���������֏͡�
��f�� ʹ�Õr��ע�����
Ո��ʹ�ÙC���˂ȵ�+24V�Դ��
ֱ�����^�����늴��y�ʩ��ؓ�d�r����������늄ӄݶ��O���cؓ�d���B��������
���B��ָʾ���c���r���l���_�������ؓ�ɕr��Ո�O�ñ��o����衣
��g���m����̖
���� JRM18 ��ݔ����̖
[CMDENBL��FAULT��BATALM��BUSY��DO101-112]
��2�� ����O��ӿڵ�ݔ����̖Ҏ��
��a�� �B��ʾ����+24V���Õr��
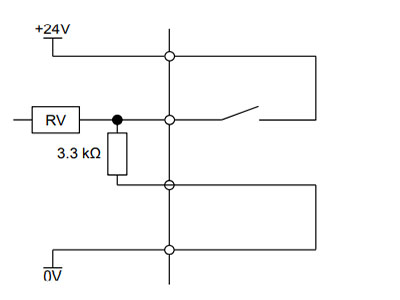
��b�� ���ՙC��늚�Ҏ��
���: �ӵ���늉����ՙC
�~��ݔ��늉��� ���c���]��+20V~+28V ���c���_�� 0V~+4V
���ݔ�����늉��� DC+28V
ݔ���迹�� �s3.3k��
푑��r�g�� 5~20ms
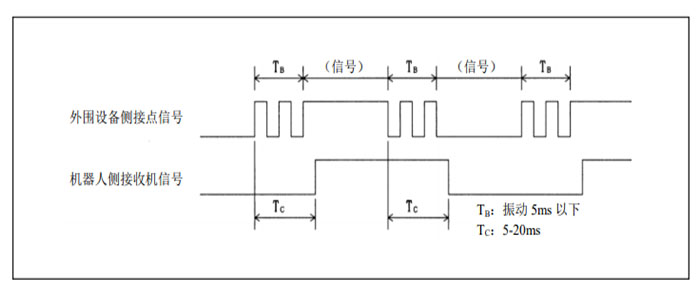
��c������O��Ƚ��cҎ��
늉�������� DC24V��0.1A��ʹ����Сؓ����5mA���µĽ��c����
ݔ����̖���� ON/OFF����200ms����
��ӕr�g�� 5ms����
�]�·��裺 100������
�_�·��裺 100k������
��d�� ʹ�Õr��ע�����
�����o���ՙC��늉�����ʹ�ÙC���˂ȵ�+24V�Դ��
���ǣ��ڙC���˂ȵĽ��ՙC��λ����횷���������̖Ҏ��
��e�� �m����̖
���� JRM18 ��ݔ����̖
[XHOLD��RESET��START��ENBL��DNS1-DNS4��DI101-DI112]
ϵ�ˣ�����
�֙C��17721351309
�Ԓ��021-50157782
��ַ�� �Ϻ��мζ��^���@·858̖2̖531-532